前言
- 场景同步在游戏里已经有很成熟的处理方式,9宫格、十字链、灯塔、4叉树、8叉树….
- 一般分为这些方面:
- 地图制作
- 区域划分
- 地图管理
- 对象管理
- 视野同步
- 碰撞检测
- 对于服务端来说压力主要在视野同步、碰撞检测,一个涉及数据广播,一个涉及数据检查
- 前段时间重构了一个2DMMO游戏的场景相关内容,使用的9宫格方式做视野管理,只是2D碰撞检测就只使用了bits标记方式,没有引入4叉树、8叉树这种
- 记录一下备忘
名词
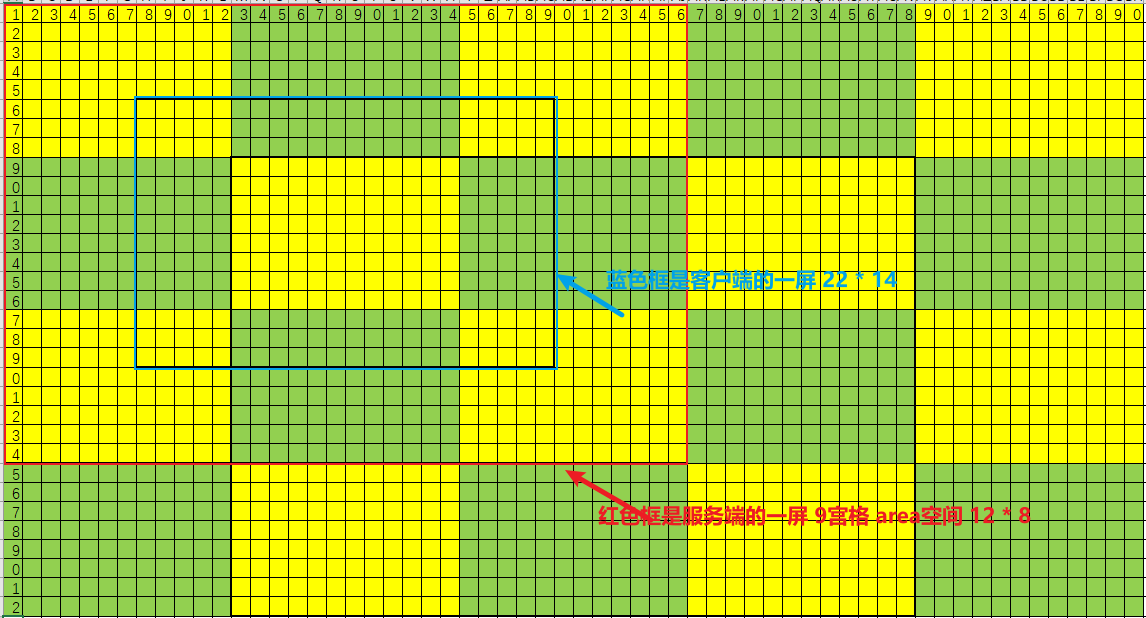
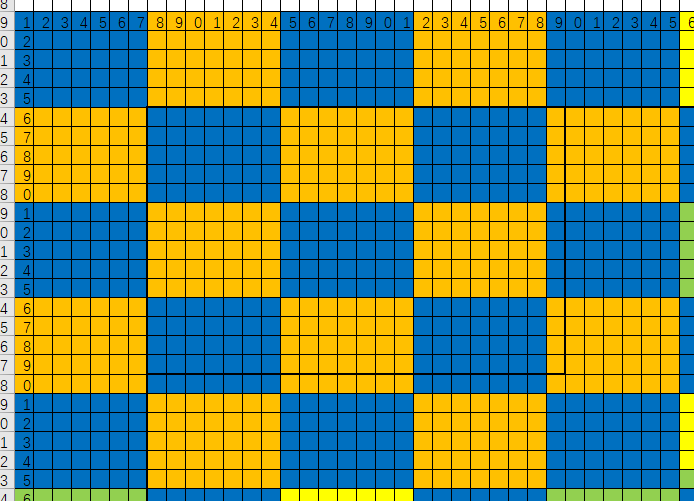
cell可站立的最小单位,一般也是场景对象的(x, y)坐标:下图涂黄、绿的小格子area9宫格的一个单位,x,y标记表示横纵各占用多少个cell:下图黄、绿标记的块eyesight视野区域半径(3*3的9宫格,这里就是 1, 1):下图蓝色、红色框示意的块,其中蓝色是客户端屏幕视野,红色是服务端管理视野,一般服务端是比客户端大的,也就是服务端先于客户端将数据同步到客户端,这样在玩家视野切换的时候表现更流畅flag配置来的静态属性(阻挡点、安全区、自由攻击….)、运行中的动态属性(栅栏、场景事件….)worldpoint一些大世界游戏会用到的概念,更小粒度的坐标点,比如4个worldpoint组成一个cell,也可以直接把这个概念简化为cell,配合 4叉树 处理碰撞问题
对象、格子管理
场景维护所在场景的对象(场景对象)
场景对象持有所在地图
uuid,cell信息视野同步是以
area为单位的,碰撞检测以cell为单位,那么对象挂在cell、area哪里更合适呢?- 两者发生的频率上视野同步更高:例如场景对象每次有动作(移动、坐下)都需要做视野同步,但是坐下这个动作不需要做碰撞检测
- 假设对象挂在
area上,视野同步只需要遍历9个area就好 - 碰撞检测只是对单个格子占用信息的检查,需要的数据只是格子的占用标记
flag - 结论:场景对象挂在
area结构上,cell对象生增加flag标记就好
1
2using entity_handles = std::unordered_set<entity_handle>;
std::vector<entity_handles> _area_entitys; // 视野格子对象列表1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
// 格子标记,做细节一点,但是匿名联合体、结构体都不是个好的习惯
struct cell_flag {
union {
int _flag = 0;
struct {
bool _barrier : 1; // 占用阻挡(如果非下面的特有占用,标记这个通用值)
bool _player_barrier : 1; // 特有:玩家占用(如果占用的是玩家,标记这个值)
bool _monster_barrier : 1; // 特有:怪物占用(如果占用的是怪物,标记这个值)
bool _item_barrier : 1; // 特有:道具占用(如果占用的是道具,标记这个值)
bool _block : 1; // 物理阻挡
};
};
cell_flag() = default;
bool is_block() const {
return _block;
}
};
struct barrier_mark {
const bool is_mark = false; // 标记判断是否占用格子
// test 值和 cell_flag 一一对应
union {
int flag = 0;
struct {
bool test_barrier : 1; // 是否检查其他占用
bool test_player : 1; // 是否检查玩家类型的占用
bool test_monster : 1; // 是否检查怪物类型的占用
bool test_item : 1; // 是否检查道具类型的占用
bool test_block : 1; // 是否检查物理阻挡
};
};
barrier_mark() = default;
barrier_mark(bool _0, bool _1, bool _2, bool _3, bool _4, bool _5)
: is_mark(_0)
, test_barrier(_1)
, test_player(_2)
, test_monster(_3)
, test_item(_4)
, test_block(_5) {
}
};
static const barrier_mark barrier_mark_none(false, false, false, false, false, true); // 不占格子,检查物理阻挡(比如用于透明场景对象)
static const barrier_mark barrier_mark_slack(true, true, false, false, false, true); // 占格子,松弛的,穿人、穿怪、穿道具
static const barrier_mark barrier_mark_default(true, true, true, true, false, true); // 占格子,默认的,不穿人、不穿怪、穿道具
static const barrier_mark barrier_mark_item(true, true, false, false, true, true); // 占格子,场景道具的,穿人、穿怪、不穿道具point 都是2维级别,为了简化转换成1维
1
std::vector<cell_flag> _cells; // 格子
cell, area 坐标系单位不一样,虽然都是 (x, y),为了干净需要一个 cell_point, area_point
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51/**
* \brief 横纵
*/
struct point {
uint32_t x = 0;
uint32_t y = 0;
};
/**
* \brief struct cell point (world point)
*/
struct cell_point {
uint32_t cx = 0;
uint32_t cy = 0;
bool operator == (const cell_point& right) const {
return this->cx == right.cx
&& this->cy == right.cy;
}
};
/**
* \brief invalid cell point
*/
static const cell_point invalid_cell = cell_point{ 0x7FFFFFFF, 0x7FFFFFFF };
/**
* \brief struct area point
*/
struct area_point {
uint32_t ax = 0;
uint32_t ay = 0;
bool operator == (const area_point& right) const {
return this->ax == right.ax
&& this->ay == right.ay;
}
};
/**
* \brief invalid area point
*/
static const area_point invalid_area = area_point{ 0x7FFFFFFF, 0x7FFFFFFF };
/**
* \brief rect_point
*/
struct rect_point {
uint32_t lx = 0;
uint32_t ly = 0;
uint32_t rx = 0;
uint32_t ry = 0;
};地图基础数据
1
2
3
4
5
6
7
8
9/**
* \brief base config
*/
struct base_config {
cell_point cell; // 地图格子数量
area_point area; // 视野块占格子数量
point eyesight; // 视野区域半径(3*3视野的话这里是 1, 1)
point area_size; // 整张地图多少个area(加载地图后计算得到)
};
视野
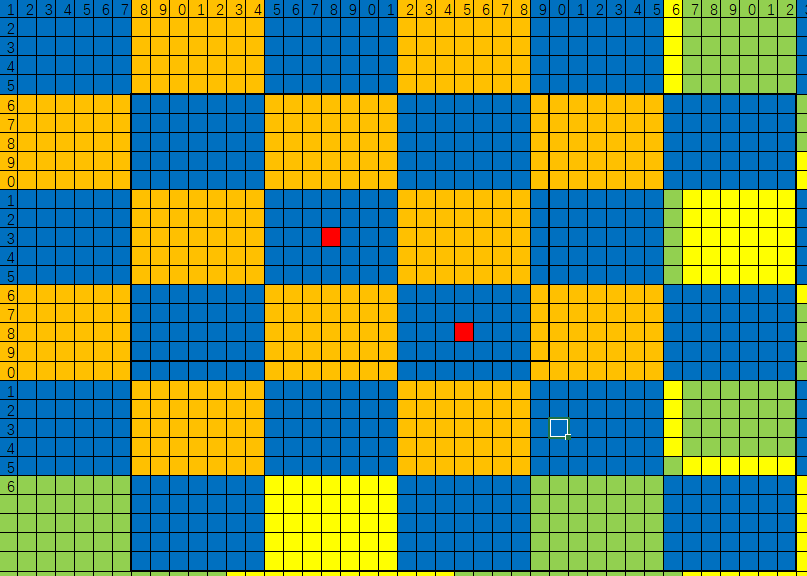
- 还是这个图,在服务端看,场景满载的同步量是: 12 * 8 * 9 = 864 (假设一个cell只有一个对象)
- 进出视野:假设一个对象从红色点移动到蓝色点,他的视野范围也就从左上角的 9 * area 变成了右下角的 9 * area
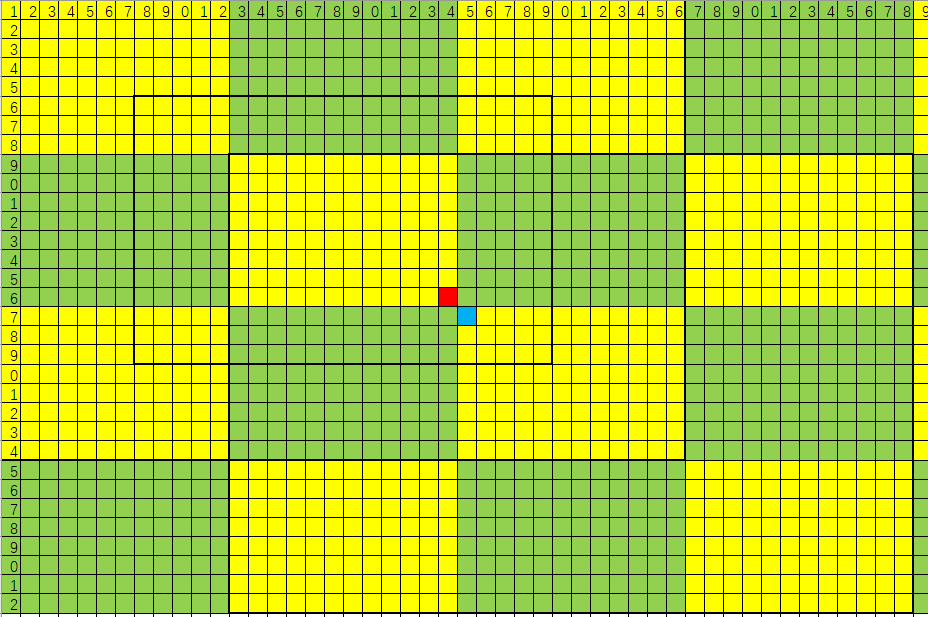
- 如图红色标记了相互离开的格子,蓝色标记了相互进入的格子,换到 area 就分别是 5 * area
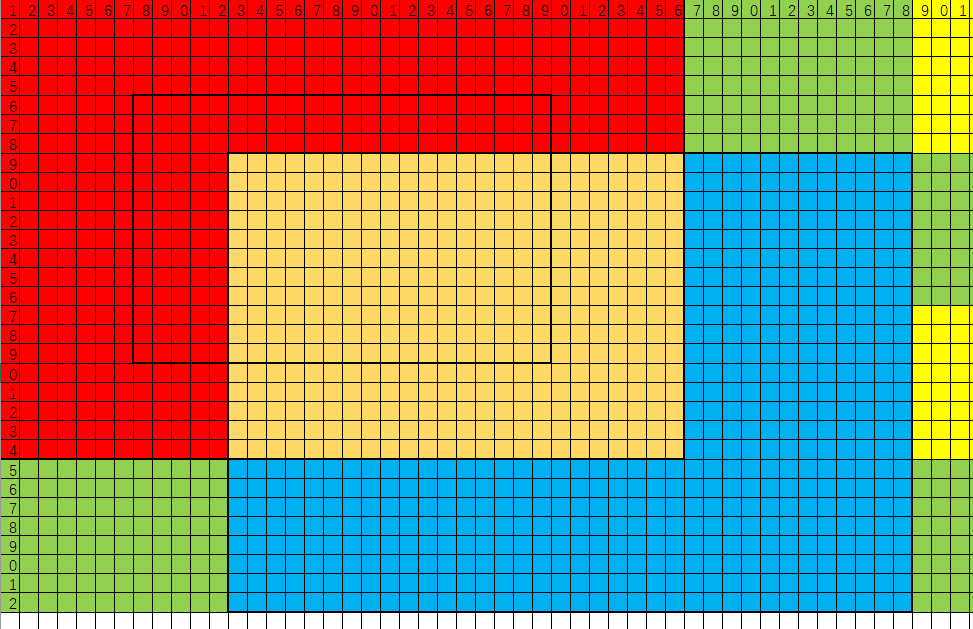
- 视野列表,想要得到视野列表就需要先获得 红蓝 area,简化图,看进出视野的相对关系
视图认为对象从 (0, 0) 移动到 (2, 2) 坐标点
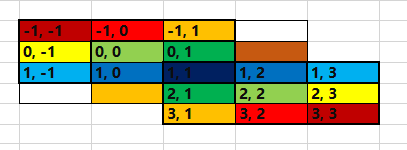
- 上图已经用颜色标记了点和点相对的关系:
1 | (-1, -1) <-> (3, 3) = (0, 0) - ( 1, 1) <-> (2, 2) + ( 1, 1) |
- 这可能是全文最有价值的一段代码:(注意下面的拷贝是必要的,如果是list可以换成splice;因为会有原(临近)坐标force传送的情况,比如原地复活;如果客户端支持,可以标记force为false,否则会因为使用对称方式导致(视野内)对象先进入视野后离开视野的情况;根据需要选择合适的方式修改这种情况)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20// 镜像关系
for (int32_t y = -_config.eyesight.y; y <= _config.eyesight.y; ++y) {
for (int32_t x = -_config.eyesight.x; x <= _config.eyesight.x; ++x) {
// 两个方向偏移后新点和目标点距离小于半径,用两圆相交的方式看待
if (!force
&& std::abs(static_cast<int32_t>(from.ax) + x - static_cast<int32_t>(to.ax)) <= _config.eyesight.x
&& std::abs(static_cast<int32_t>(from.ay) + y - static_cast<int32_t>(to.ay)) <= _config.eyesight.y) {
continue;
}
if (ok_from) {
auto leas = entitys(area_point{ from.ax + x, from.ay + y }, nullptr);
std::copy(leas.begin(), leas.end(), std::back_inserter(leaves));
}
if (ok_to) {
auto ents = entitys(area_point{ to.ax - x, to.ay + y }, nullptr);
std::copy(ents.begin(), ents.end(), std::back_inserter(enters));
}
}
}
25宫格
- 考虑这个问题是因为9宫格的范围毕竟太大了,想减少遍历的消耗
- 也想找到一种方式可以在对象多的场景优化一些性能
- 而且在服务端视野比客户端大的前提下,服务端其实是有优化空间的
- 如上格子满载的情况下,9格视野最多需要处理 12 * 8 * 5 (exit) + 12 * 8 * 5 (enter) = 960
- 5 * 5 宫格 area:(7, 5), 满载同步量: 7 * 5 * 25 = 875,格子范围并不影响客户端同步效果
- 从红格子跳到另一个红格子:满载需要处理的同步量: 7 * 5 * 9 (exit) + 7 * 5 * 9 (enter) = 630,相比960的数据量,少了1/3
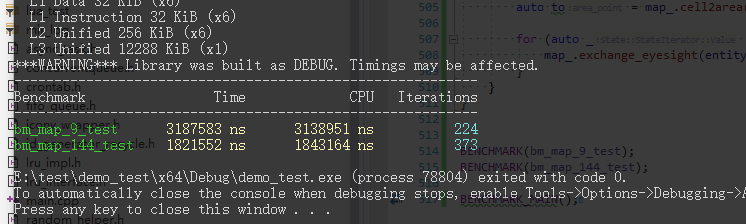
- 简单压测的结果
思考
- 缩小 area 尺寸带来的问题:
- 最关键是同步变得频繁了;沿X轴单方向走,9宫格走12cell离开area,25宫格走7cell
- 为什么还考虑用这个方案:
- 同步频率提高了 40%,同步量减少了 30%,并且同步量是在非满载的情况下,收益是更差的,但是如果技能的命中范围是在 7 * 5 内的,对战斗目标的筛选是提高了很多的
- 进出视野会引发事件,单线程模型下,更少的进出视野可以减少1个逻辑周期程序的处理量
- 当前地图场景的设计,视野单位占格子数量和视野区域半径两个数值是配置项,可以每张地图都不同